 The picture
at the right shows two models of a
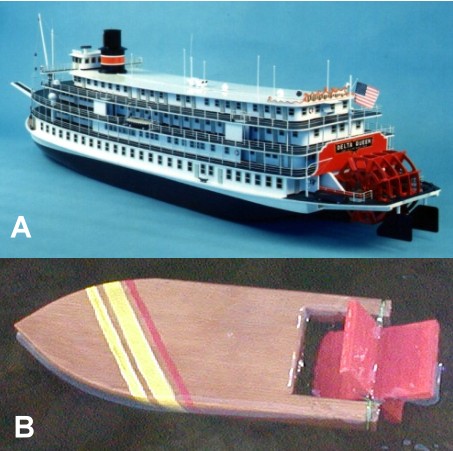
rear-paddle-wheel boat. Which one is better?
The picture
at the right shows two models of a
rear-paddle-wheel boat. Which one is better?The answer: It depends! Specifically, it depends what you want to do with the model.
- If you want the model to look good on your mantel or in a museum, then clearly the choice is A.
- If you want to use the model to investigate how a paddle-wheel boat works, then equally clearly the choice is B.
B is a working model. The objective is to use it to mimic the operation of a paddle-wheeler. Why mimic the operation? There are a couple of reasons to want to. The boat in the picture is a toy; it is fun to play with working model boats. But you can also use the model to learn about paddle-wheeler operation.
Let's look at the second motive: learning from the model. Suppose you want to learn how a paddle-wheeler works, and what changes might make it work better. Then you want a model that contains the important elements that you want to investigate, but it doesn't need to contain any more elements. If the goal is to relate paddle speed to boat speed, you need a paddle and hull of the appropriate shape and weight -- and that is all. It doesn't matter how many windows the boat has on each deck, or whether there is a pilot house or smokestack; those features of a model are completely irrelevant to the purpose. Moreover, they are expensive to include in the model, and may even get in the way of the researcher.
Important point: there is a third kind of model, whose only purpose is for learning about operation.
C is a mathematical model. If you come up with a bare-minimum-simple working model (say, model B without the racing stripes), you probably have a system simple enough that it can be described by equations well known to physicists and engineers. At that point, you don't have to get your hands wet to answer the questions a working model could answer; you can let a computer crank through the equations and answer the questions for you.
 Now, just
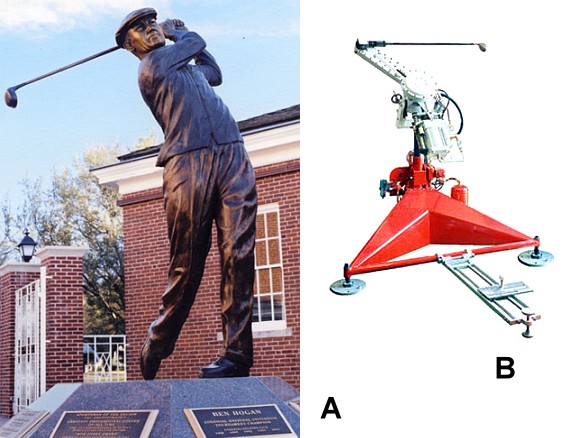
to see if you've been paying attention, at the left are two models of a
golf swing. Which one is better?
Now, just
to see if you've been paying attention, at the left are two models of a
golf swing. Which one is better?The answer is the same as above, and for all the same reasons. That goes for (A) the scale model, (B) the working model, and (C) the mathematical model (not in the picture).
In this article, we are tracing the most important developments (in my opinion, of course) in models of the golf swing. In each case, there is a mathematical model; there may also be a physical working model to demonstrate the principles. We will look at swing models starting with the simplest (the double pendulum model), and work towards more complex models. Each of the models answers some questions about the golf swing, but the model does not include the detail to answer other questions. For instance, even the full-body model -- which simulates 14 joints -- cannot address which fingers should be the "pressure points" for the swing; individual fingers are more detail than the model contains.
Let's finish this introduction to models by reminding ourselves what a swing model is NOT:
A swing model is not the same as a model swing! When most people hear "model swing", they think of a perfect swing, one to be emulated when making your own swing. That is a correct interpretation, but it is not what a "swing model" is about. A swing model is a simplified representation of a swing (either mechanical or mathematical) that you can "play with" to learn more about what works in a golf swing and what doesn't.
A swing model is not an actual, human golf swing! This should go without saying, but too often it doesn't. A model is a simplification of a golf swing. In any simplification, details are left out. Those details may be important or not, depending on what questions we are trying to answer using the model. For instance, the Iron Byron -- the swing robot in picture B -- teaches us a lot about the left arm, the wrists, and the shoulder turn. But it does not teach us anything about how the torso or hips or legs create the body rotation, just what the body rotation does to the arms and club. You need a model that has a representation of torso, hips, and legs to answer that question.
 next to it. You can use this summary in at least three ways:
next to it. You can use this summary in at least three ways: