
|
| Home ⇒ golf ⇒ swing ⇒ Current Article |
Article
Contents
Opening the loop -- instrumented grips
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
While both studies added
instrumentation to the grip, they approached the problem of getting the
hand forces rather differently.
|
The Choi-Park study
This is an interpretation of the paper "Three Dimensional Upper Limb Joint Kinetics of a Golf Swing with Measured Internal Grip Force" by Hyeob Choi and Sukyung Park (The National Center for Biotechnology Information, June 2020).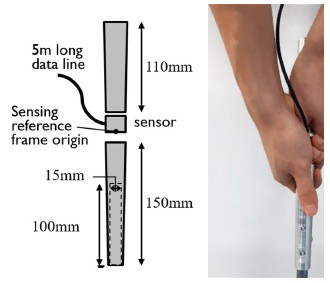 Choi & Park attacked a classical problem in the biomechanics of the golf swing, the "closed loop" problem. That is, an inverse dynamics analysis of a golf swing can measure the combined contribution of hands, arms, and shoulders, but not the right side or left side individually. Choi & Park did this by instrumenting the grip of a club to get distinct measurements for the right and left hand. In particular, they placed a 6D sensor in the grip between the right and left hands. The sensor measures the difference between the hands, and allows teasing apart the contributions of individual hands, arms, and shoulders. The participants in the study were "nine healthy male professional golfers registered by the Korea Golf Federation or the Korea Professional Golf Association." Each took five full swings with the instrumented driver. The swings were measured with respect to:

|
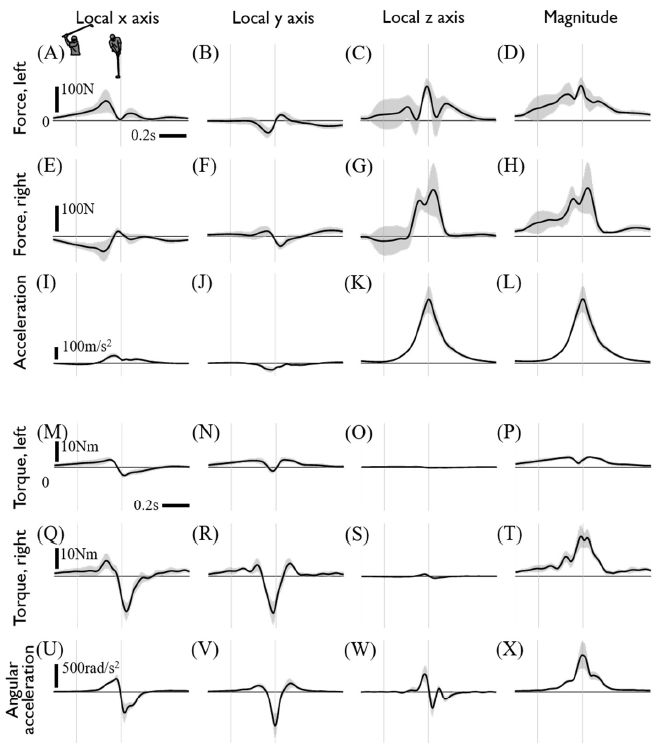
Figures 6 and 7 present similar curves for the wrists, elbows, and shoulders. I'm not looking at those results in detail here, just the forces and torques that the hands impose on the club.
The graphs are the averages of all 45 swings (9 golfers, 5 swings each). The range over the 45 swings is shown as gray shading surounding the curve of the graph.
Definition of local axes
 Before we start, we must
understand the axes in the paper. Here is
part of Figure 4. It shows the X, Y, and Z axes used to
describe the club. The notion of "local axes" means that the axes are
part of
the club; when the club moves, so do the axes. Table 1 of the paper
describes the axes in words; here is the first line of that table,
describing the
axes of the club as acted on by the hands. (Other lines describe the
wrists, elbows, and shoulders; we won't do anything with those here.) Before we start, we must
understand the axes in the paper. Here is
part of Figure 4. It shows the X, Y, and Z axes used to
describe the club. The notion of "local axes" means that the axes are
part of
the club; when the club moves, so do the axes. Table 1 of the paper
describes the axes in words; here is the first line of that table,
describing the
axes of the club as acted on by the hands. (Other lines describe the
wrists, elbows, and shoulders; we won't do anything with those here.)
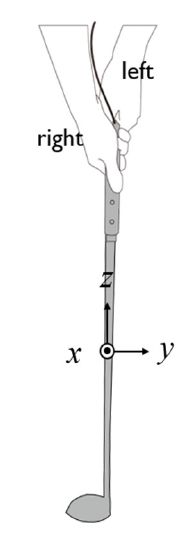
But the diagram and the table are both ambiguous. Does the definition of the y-axis mean "a direction the clubface lies in" or "the direction the clubface is pointing"? And the crude drawing does not help much; is the club a driver at address or an iron laid open 90°? The key to this ambiguity is in the hands in the diagram. Given the hands gripping the club, I can only conclude that the y-axis is the direction the clubface is pointing, and the club in the diagram is intended to be a driver. With that interpretation, here are the directions of the forces and torques for each axis. I am assuming that Choi and Park are using the conventional right-hand rule for torques, common in engineering and physics texts.
|
||||||||||||||||||||||||||||
The Koike studies
Sekiya Koike (and his team, which seems to vary from study to study) published two studies that I have seen. Unfortunately, I no longer have the long form of either study. I have a marginal photocopy of some key graphs from the 2005 paper, and the short form of the 2016 paper ("Force and Moment Exerted by Each Hand on an Instrumented Golf Club", 34th International Conference on Biomechanics in Sports, July 2016) from the conference proceedings. The 2016 study is more interesting because it includes forces along the shaft axis (not in the 2006 paper); that allows the computation of the moment of force, not just the hand couple.
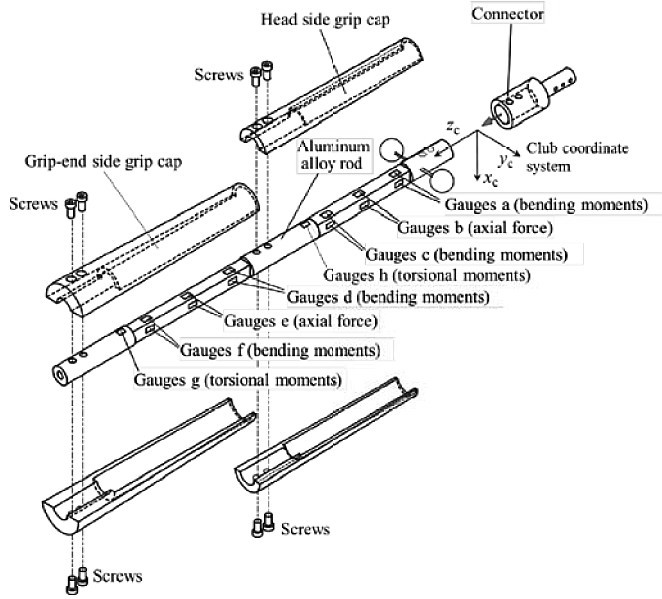 Koike's grip instrumentation is very different from Choi and Park's. Koike embeds strain gauges in the grip, to measure the forces on the shaft. The strain gauges are pressed by a rigid, segmented replacement for the usual grip. There are four grip segments, by hand (lead and trail) and by side of shaft. The gauges are placed so that not only forces but individual hand torques can be inferred from the combination of gauge readings. The graphs showing the results are provided in a different set of axes from Choi and Park. Instead of the local club axes, they present axes related to the swing plane. (This will save us some computation, since the Koike axes are what we need in order to compare results with the well-established outputs from inverse dynamics studies.) 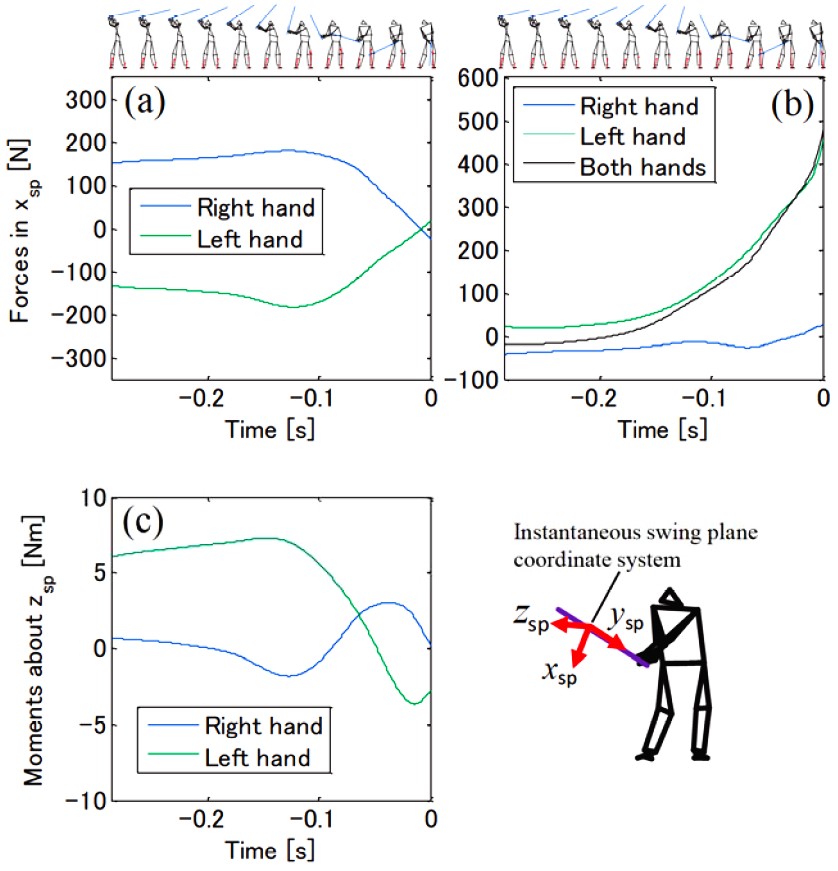
|
Calculations
My goal for the calculations was to get a time-series graph from the study, to compare with previous (necessarily closed-loop) inverse dynamics studies from researchers Sasho MacKenzie, Young-Hoo Kwon, and Steven Nesbit. That involves finding the in-plane torques acting on the shaft. The graph will separate the hand couple from the moment of force, but combine the hands. It was important that these torque graphs be the torques in the swing plane like the classic studies' results, not those of Choi and Park's local axes. Koike's results were presented as swing-plane forces and torques already; the step of mapping them from local club axes to the swing plane was unnecessary.To do the mapping from local club coordinates to swing plane coordinates, I combine the axis-by-axis forces and torques in whatever manner necessary to keep the reference in-plane. Such combination turns out to be different from step to step, but is always dependent on the angle of rotation between the clubface and the swing plane.
If you are not interested in the calculations but just the results, you can go now to the discussion section and skip the details.
Digitize the graphsThe first step was to enter into a spreadsheet the force and torque graphs (Figures 4 and 5 from Choi and Park, and the three graphs from Koike). I know of no way to do it except the painstaking work to transcribe it point-for-point by hand, which is what I did. To save anybody else the trouble, I have made the spreadsheet available for download. The file is in ODS format. My spreadsheet was created in LibreOffice Calc, an open-source spreadsheet program. Excel claims to be able to import .ODS files, but I have not tested this one in Excel.Step 1 - Digitizing graphs by hand is tedious work. The only bright spot is that the graphs are already in the form of pixels in my computer, and I have an image editing program to help me deal with it. The first step was to zoom in on the image until I could see some pixel granularity or artifacts on my 24" monitor screen. I took screenshots of thse enlarged graphs, and saved them in JPEG form. These I loaded into a photo editor program with an important property: it has a box that gives the [x,y] coordinates of the current cursor position, in pixels. (The program was ULead PhotoImpact, but most serious image editors have this feature.) Then I placed the cursor on a desired point on the graph, and recorded the appropriate coordinate[s] on the spreadsheet. After transcribing the first graph -- with the hand tenseness you would expect -- I got the idea of zooming in another factor of 3 so I had some slack at finding the point on the graph. A few details of the digitization of the pixels:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
Rotation functionThe data in the Koike paper is given as the components of force and torque in the swing plane. That is what we need, because the inverse dynamics studies we are comparing it with uses the swing plane frame of reference. But the Choi-Park data is given in terms of axes local to the club itself. So in order to project the force and torque data into the swing plane, we need to know the angle between the club and the swing plane. And it varies over the downswing. In this section, we look at what we need to do for the Choi-Park data to convert it to forces and torques in the swing plane -- as the Koike data already is. The club rotates roughly
90° about its z-axis
during the downswing. Consider: The club rotates roughly
90° about its z-axis
during the downswing. Consider:
In the [x,y] plane, the forces and torques in the x and y axes combine trigonometrically. Let's use the sine and cosine of rotation r to come up with a function that gives the in-plane results in the table. The formulas for in-plane force and torque become: F = Fx sin(r) + Fy cos(r)
T = Tx cos(r) - Ty sin(r) So now we know how to combine the forces and torques in the local axes (what we have in the waveforms) to get the in-plane forces and torques. The problem is, we only know rotation r at impact (very close to zero, or the shot is off-line) and approximately at transition (approximate because different golfers have different wrist flexion at transition). What can we do to get a useful function of rotation vs time? Well, we do have the angular acceleration of the club shaft for the whole downswing. (In calculus terms, that is the second derivative of r, denoted r''.) It is the z-axis angular acceleration in Figure 5 of Choi-Park. If the waveform, which we have also digitized, is the second derivative of r, then we can find r by two integrations. The first integration gives the angular velocity r' and the second the angle r itself.
Finally, I tested the three methods of integration for accuracy. I applied them to an analytical
function similar to what we have here, but where we know the correct
answer. I used all
three methods to integrate a sine function, which will give a raised cosine,
both of which we know exactly. The percentage errors accumulated are
shown in the following table.
This strongly recommends using Runge-Kutta. But even having chosen Runge-Kutta, the integration was not straightforward to implement. It requires three values for every iteration: at time sample i, i+½, and i+1. But we don't have a fomula we can use to evaluate at i+½. So we have to use three values from our table of samples. Each iteration will involve i, i+1, and i+2, and Δt is the time interval for two samples, not one. I tried three different variants to compute the Runge-Kutta process:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
Hand coupleAt this point, we have the force exerted by each hand individually:
Torques of interest to answer this question are y-axis torques at the beginning of the downswing and x-axis torques near impact. In between, it is a mix of the two. In particular, it is a weighted sum of x-axis and y-axis torques, where the weighting coefficient is a function of the angle of rotation.  We are trying to compute the
in-plane couple exerted by both hands together. It's obvious how to
handle the
individual hand torques; just add them.
But we also need to account for the in-plane cross-shaft forces,
because they
are exerted
at different places on the grip. As we can see from the diagram
the L and
R
forces are applied a distance d apart,
creating a torque. (The distance d is about 8.5cm for a golfer's grip.)
We can represent the blue quantities with an
equivalent force F
and couple T
shown in red. The point of the equivalent force and couple is the
mid-hands point shown in green, which is where most biomechanics
studies apply the hand forces. The equivalent for F is clearly L+R. The couple
is a little more work to find, but not much more. We are trying to compute the
in-plane couple exerted by both hands together. It's obvious how to
handle the
individual hand torques; just add them.
But we also need to account for the in-plane cross-shaft forces,
because they
are exerted
at different places on the grip. As we can see from the diagram
the L and
R
forces are applied a distance d apart,
creating a torque. (The distance d is about 8.5cm for a golfer's grip.)
We can represent the blue quantities with an
equivalent force F
and couple T
shown in red. The point of the equivalent force and couple is the
mid-hands point shown in green, which is where most biomechanics
studies apply the hand forces. The equivalent for F is clearly L+R. The couple
is a little more work to find, but not much more.When we move the point of application of L and R to the mid-hands point: TL = - ½ Ld
and TR = ½ Rd
Therefore: T = ½ (R -
L)d
(If you need to know how I converted forces into a force and a couple, there is an excellent tutorial video on YouTube.) For the Choi-Park calculations, where we are given club-referenced axes, it is important to note that these are y forces creating an x-axis torque. The direction of the torque can be seen by applying the right-hand rule to the x-axis. When we make the same observation about x forces creating a y-axis torque, the sense is the opposite and the forces' factor is (L-R) instead. But we're not done. This is the way to find x and y forces and their couple. But our goal is in-plane forces and torques. This requires using the angle of rotation r in the projection formulas from the section on Rotation. Let's use C to designate hand couple, and use subscripts r and l for right and left and x and y for the respective axes. Cx = Trx + Tlx + ½d(Fry - Fly)
Cy = Try + Tly + ½d(Flx - Frx) Cin-plane = Cp = Cx cos(r) + Cy sin(r) This allows us to compute the in-plane couple, so we can compare it with this heavily-studied question for both hands together. If it doesn't match previous results, that puts the Choi-Park and/or Koike results under suspicion. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
Moment of forceNext, we calculate the other torque giving the club angular velocity -- the moment of the force on the handle. The quantities we need are shown in the diagram below.
For Choi & Park, we need to start by projecting separate x and y forces into the swing plane, to combine to form Fxy. Fxy
= - Fx sin(r) - Fy cos(r)
where r is the angle of rotation of the club about the shaft axis. The sign of the in-plane force was chosen to denote a force away from the target. We need that direction because we want a moment of force that helps the release of the club to be positive. Helping release means the line of action of the force is in front of the CoM of the club. Just from the geometry in the diagram, it is easy to conclude that: F
= sqrt (Fz2 + Fxy2)
a = arcsin (Fxy / F) D = L sin(a) Moment of force = F D If we apply these formulas in the order shown, we will get the moment of force. Note that this does not include the effect of gravity. But gravity contributes less than 3Nm of torque at any point of the swing, and considerably less for most of the swing. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
Summary of computed torquesThe end goal is to get the three in-plane torques that are interesting:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
 So which method
did I use? I started with
just an Euler computation to keep it simple, but it gave results too
far off to be taken
seriously. At impact, the face was still open 40°. Alternatively, we
could postulate that the downswing started with the face closed 40°, so
it would get to square at impact. Sorry, but that's a stretch even for
Dustin Johnson -- much less the average professional. So I
implemented all three on the spreadsheet. Here is how
they looked when I was done. The Modified Euler and Runge-Kutta are
indistinguishable at this scale. I added the green curve, an
idealization
of the rotation function. It is implemented as a sine curve from -90°
to +90°, and the spreadsheet user can define both the impact point
(rotation=0) and the duration of rotation.
So which method
did I use? I started with
just an Euler computation to keep it simple, but it gave results too
far off to be taken
seriously. At impact, the face was still open 40°. Alternatively, we
could postulate that the downswing started with the face closed 40°, so
it would get to square at impact. Sorry, but that's a stretch even for
Dustin Johnson -- much less the average professional. So I
implemented all three on the spreadsheet. Here is how
they looked when I was done. The Modified Euler and Runge-Kutta are
indistinguishable at this scale. I added the green curve, an
idealization
of the rotation function. It is implemented as a sine curve from -90°
to +90°, and the spreadsheet user can define both the impact point
(rotation=0) and the duration of rotation. It is very reasonable to make the argument that we
It is very reasonable to make the argument that we Sanity tests
My first goal, before "What can we learn about the golf swing?" has been "How much can we trust the results of these studies?" To this end, I looked at the Choi-Park and Koike results with two sanity tests in mind:- We have a wealth of inverse-dynamics studies that don't try to open the loop. They show what both hands together do to the club. The most familiar results are the hand couple and the moment of force in the swing plane. Most importantly, those studies all agree with one another in several important features. (We'll look at those features below.) That begs us to ask the important question, "How far from existing, trusted studies are the Choi-Park and Koike results?" We already saw how to calculate the both-hands-together hand couple and moment of force. Let's compare them with the classic results and see if they agree.
- The other sanity test is, "How well do the Choi-Park and Koike results compare with one another?" If they agree, then we might be able to learn something about how the hands' role differs. But if they disagree, then we don't know which to believe, if either.
Comparison with previous studiesLet's look at three sets of curves that are rather representative of what inverse dynamics tells us about the hands-to-club torque. That's "hands" -- plural! Remember that inverse dynamics cannot distinguish which hand does what. |
||||
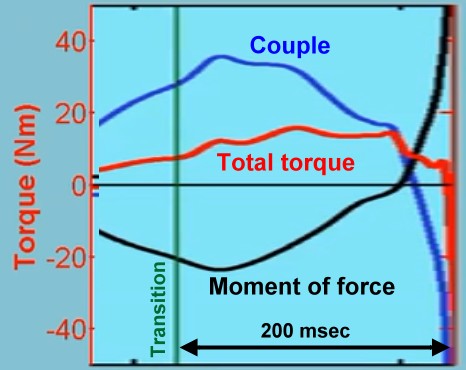 Dr.
Sasho MacKenzie has posted multiple instructional videos to the
web. Here is a screenshot from one of his videos,
where he makes the point that this picture is a very common pattern.
The video showed this pattern of hand couple, moment of force, and
their sum (the total torque applied to the club) for several golfers,
including a multiple major winner. They all looked pretty much like
this, and Sasho says all decent swings look more or less like this . Dr.
Sasho MacKenzie has posted multiple instructional videos to the
web. Here is a screenshot from one of his videos,
where he makes the point that this picture is a very common pattern.
The video showed this pattern of hand couple, moment of force, and
their sum (the total torque applied to the club) for several golfers,
including a multiple major winner. They all looked pretty much like
this, and Sasho says all decent swings look more or less like this . |
||||
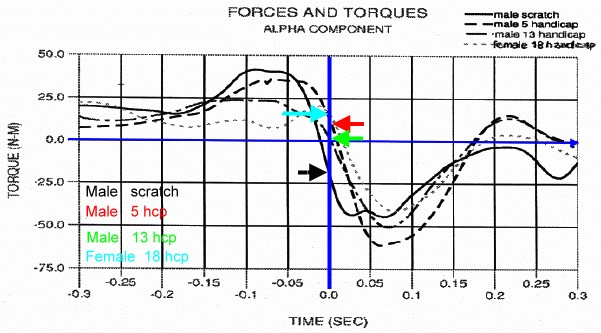
 Dr.
Young-Hoo Kwon posted a tutorial
on Facebook about the mathematical model of the golf swing. (The
introductory installment was on November 4, 2015.) He included this
graph as generally representative of the swing of an elite competitor.
He works with many scholastic and professional golfers on their
biomechanics, so he would be in a position to know what is typical. Dr.
Young-Hoo Kwon posted a tutorial
on Facebook about the mathematical model of the golf swing. (The
introductory installment was on November 4, 2015.) He included this
graph as generally representative of the swing of an elite competitor.
He works with many scholastic and professional golfers on their
biomechanics, so he would be in a position to know what is typical.On the graph:
|
||||
 Dr Steven Nesbit and Monika Serrano
published a paper in the Dec 2005 issue of the Journal of Sports Science and
Medicine on work and power in the golf swing. They did a
multiple-body-part inverse dynamics study of the driver swings of four
golfers of very different skill levels. Dr Steven Nesbit and Monika Serrano
published a paper in the Dec 2005 issue of the Journal of Sports Science and
Medicine on work and power in the golf swing. They did a
multiple-body-part inverse dynamics study of the driver swings of four
golfers of very different skill levels.This is Figure 11 of that paper, with a few of my own notations in color. It shows the in-plane component of the hand couple for the four golfers. Since all the other studies (MacKenzie, Kwon, Choi & Park, and Koike) were based on highly skilled golfers, we will use Nesbit's scratch golfer as the model here. (Note: The Nesbit paper did not include moment of force, nor the data from which moment of force could be readily calculated.) Wait! Nesbit? Wasn't there a lot of controversy about Nesbit's results vs the rest of the world of biomechanics? Yes, indeed! But in the overall scheme of things, Nesbit's results look a lot like the MacKenzie and Kwon results we have already seen. And that is even more true for Nesbit's scratch golfer. The controversy was whether the hand couple is positive or negative at impact; for the scratch player, there is no dispute on this point. |
||||
Hand Couple Here
is a graph showing the hand couple for each of the five studies: Choi
& Park, Koike, MacKenzie, Kwon, and Nesbit. The "classic" studies
are shown as dashed lines and the instrumented grip studies as heavy
solid lines. Here
is a graph showing the hand couple for each of the five studies: Choi
& Park, Koike, MacKenzie, Kwon, and Nesbit. The "classic" studies
are shown as dashed lines and the instrumented grip studies as heavy
solid lines.They have a few features in common:
|
||||
Moment of force Here
is a graph of moment of force for four of the studies. (Nesbit is missing; that study does not
provide the moment of force, nor the forces necessary to compute it.) Here
is a graph of moment of force for four of the studies. (Nesbit is missing; that study does not
provide the moment of force, nor the forces necessary to compute it.)Neither Choi-Park nor Koike look anything like what we are used to.
|
||||
Neither Choi-Park nor Koike is
close enough to
the time-tested inverse dynamics studies that we can trust it to be
true. Let's move on to...Comparison with one anotherChoi & Park and Koike teased apart the left and right hand forces and torques, but in two different ways. Let's look at how the hands differ right from left, and specifically whether the two approaches find them differing in the same way. If not, Choi-Park and Koike have a consistency problem. We would not know which of them to trust to answer our questions -- if either.Hand coupleHere are graphs of the hands' contribution to the hand couple. The color coding for both graphs is:
Axial forceThe moment of force of both studies is far from reality. The reason is that the magnitude and even the sign of the in-axis cross-shaft force is far from reality. But the axial force is the right shape for both (if not necessarily the right size), so let's compare that. The color code is:
ConclusionsI think that both teams are onto something important!Instrumenting a grip should be a good way to determine the answers to those questions. But I am convinced we don't have answers yet. We still have to refine the technique, get rid of the things that made the current studies so inaccurate. My bottom line is that neither the Choi & Park results nor the Koike results are ready for prime time. We cannot use them yet to decide what torques and forces better players apply to the club, much less what to teach golfers to do. |
||||
What needs to be done better?I know it is unconventional to have a major section after the "Conclusions", but I'd like to itemize things I see as needing fixing in order to get useful results from an instrumented grip.Instrumenting a grip is a promising approach, but neither implementation gave trustworthy results -- yet. That says something needs to be done better. Here is a list of things I would suggest for the next try. But before we do that, I'd like to review possible ways the fault could be mine. I don't think I have mistakes here, but if I do...
|
||||
Both - Pay attention to inverse dynamicsThere have been a lot of inverse dynamics of the golf swing published over the past decade or more. Together they constitute what we know about the golf swing. And together they constitute a fairly consistent picture of the forces and torques the hands apply to the club. The biggest missing component, in the opinion of many, is failure to distinguish between right and left arms/hands -- the closed loop.So it is imperative that any attempt to separate right from left -- to open the loop -- needs to be consistent with what we already know. Before you present your results to the world, do what I did: add the hands back together and make sure the closed loop solution is right. If your solution does is not consistent with the inverse dynamics literature, it is not credible. Let's face it:
|
||||
Koike - More golfersChoi & Park - Separate golfersBoth studies have the problem of only "one swing" graphed. The explanation for the Koike study is easy; there was only one golfer. In the case of Choi & Park, the graphs are the average of 45 swings from 9 golfers. To their credit, Choi & Park also included a gray area indicating variation in the sample. That might be enough. Or it might not, if there were several different ways of swinging the club represented.During the Zoom conference, someone (I think Michael Finney) said, "There will always be criticism. If you average the data, someone will need to see separate graphs. If you keep them separate, someone will want to see an average." Too true. But let's look at a single issue -- how the hands divide up the axial force -- and see if that might guide us. Here is a pair of graphs, one from Koike and the other from Choi & Park. They show the axial force (pull along the shaft axis) vs time. The red vertical line on each graph is the impact.  Again, remember that Choi-Park is an average of five swings for each of nine golfers, while Koike is a single golfer. Choi & Park chose to show the swing-to-swing variation by a gray area surrounding the average. They never indicate whether that is a total variation or one standard deviation. Now to see what variation needs to tell us. Note that the Koike data shows the right hand to be exerting negligible force, while Choi-Park has a substantial force (over 100N). That difference might be a real disagreement, or it might mean that Koike's one golfer is something of an outlier. But... The gray area showing variation does not show any data close to zero right-hand force at impact. Even a graph along the bottom edge of the gray area attributes a lot more force to the right hand than Koike's graph. And that is for the whole final third of the downswing. What are we to make of this? Was Koike's one golfer such an outlier than none of the Choi-Park golfers had that pattern? I find it hard to believe, since we can point to tour players who obviously have the Koike pattern at impact. My takeaway is:
|
||||
Both - Different club, different swingIf the club is too different from a regular club, it will affect the swing. In other words, it will affect the forces and torques the golfer uses, and that the instrumented grip records. And both Choi-Park and Koike had something very different from the regular club. The instrumented grip added a lot of weight to the butt-end 10 or 11 inches of the club.
So how big were the changes in the measured forces and torques due to the instrumentation of the club? Choi and Park anticipated this question. Their Figure 3 (reproduced below) shows kinematic graphs that compare the position of a regular club with the instrumented club. (Not the torques, not the speeds, but the position.) 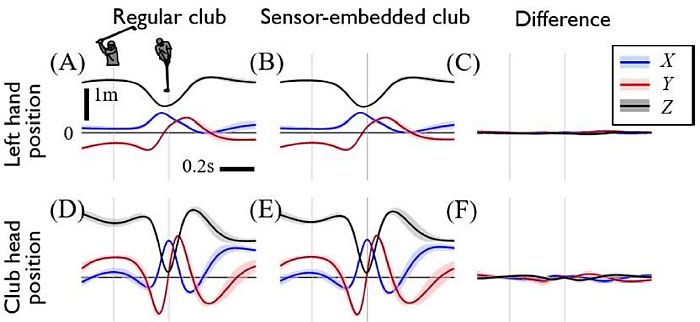 The "difference" curves are visually small, which may or may not be intentional. I don't have any intuition for what that says about the torques, so I'm not sure whether this explains the difference from previous studies. But they do state in Section 2.4: The trajectory of the left hand and the
clubhead and the main positions of the swing, showed relatively small
difference with an RMS of 0.06 and 0.16 m, respectively.
This is supposed to be a small difference. But 0.06m is 6cm or more
than 2 inches, and 0.16m is 16cm or more than 6 inches. That does not
sound small to me. Moreover, this is an RMS
value, not a peak value. The error graph looks to have a variability
similar to a sine wave, so we could expect the peak errors to be about 3 and
9 inches respectively. That is not a small effect, in my opinion.There is one difference that is calculable. Adding that much weight at the grip moves the club's center of mass much closer to the mid-hands point. In doing so, it cuts the moment arm for the moment of force by about 40% for the Choi-Park club, somewhat less for the Koike club. So the moment of force will probably be 40% lower than I calculated. That doesn't help much. The big problem with the moment of force is its shape not its size, particularly how early it goes positive. This change of balance point will not affect the zero-crossing at all. |
||||
Choi & Park - SmoothingFrom Choi and Park, Section 2.4:All collected data were filtered with a
fifth-order bi-directional
Butterworth low-pass filter with a cut-off frequency of 10 Hz.
A
fifth-order filter is pretty sharp, so we can assume any frequency
components over 10Hz would be negligible. That may be a problem if
you are looking for rapidly varying behaviors, for instance in the vicinity of
impact. I come from an EE background, and worked with sampled data
systems in the 1960s. For those projects, I lived by the Sampling Theorem. This was originally stated by
Nyquist in 1928, and formalized as part of information theory by
Shannon in 1948.The sampling theorem says that, given a signal with no frequencies in it higher than F, you can take samples of the signal at 2F or anything above that, and reconstruct the original signal with perfect accuracy based only on the samples. The reconstruction is conceptually pretty simple; just pass the samples as pulses through another lowpass filter of cutoff frequency F. That's what the sampling theorem says you can do. It also tells you what not to do. If you sample at less than 2F, any reconstruction is going to have some artifacts that keep it from being accurate. Let's look at what the sampling theorem implies for this system. Because of the 10Hz filter, any sampling frequency above 20Hz should be sufficient. A 20Hz sampling rate means a sample every 50msec. Underlying that calculation of sampling frequency is an interesting correlary. Any feature of the waveform that lasted less than 50msec was probably filtered out by the smoothing filter. It may also have been replaced by distracting artifacts of the smoothing filter.  Let's
look at what such a filter does to a fast transition in its input. The
figure shows what a step function input (the red line) looks like
after
going through a fifth-order Butterworth filter (the white oscilloscope
trace). The
filter does several things to the sudden input change: Let's
look at what such a filter does to a fast transition in its input. The
figure shows what a step function input (the red line) looks like
after
going through a fifth-order Butterworth filter (the white oscilloscope
trace). The
filter does several things to the sudden input change:
What this tells me, at the very least, is that I cannot depend on any of the details during the last 40msec of the downswing. They constitute the release of the club, and occur on too fast a time scale for the smoothed data to represent. It also tells me that the graphs may be delayed from when they actually occurred. Or perhaps not; I didn't see anything in the Choi-Park paper that said they corrected for this, but they might have. If they wanted, could they have used a higher filter cutoff than 10Hz? Yes, unless they were removing so much noise they needed such heavy smoothing. They sampled their motion capture system at 200Hz and the sensor in the grip at 400Hz. So why use a smoothing filter suitable for a 20Hz sampling rate? If they had used a smoothing filter of 30-50Hz, that would have allowed capture of time-domain features of the order of 17msec to 10msec, fast enough to capture most of the interesting features of the downswing. And it still leaves a factor of 2-3 to reduce noise and quantization errors, assuming that would be enough. I don't know what noise they were dealing with apart from quantization noise, so I don't know if it is enough smoothing for what they encountered. But the smoothing they used smothers anything that happens during release. While we are talking about smoothing the data at the Zoom metting, Rob Neal made an interesting comment. He pointed out that the curves published by Choi and Park are the average of the 45 swings in the experiment. Averaging is itself a smoothing operation. So the smoothing may well be even heavier than the 10Hz cutoff frequency would suggest. |
||||
Both - Overlapping hands Both Choi-Park and Koike
instrumented the grip by dividing it into a lower part (toward the
clubhead) and an upper part (toward the butt). They assumed that
anything done to the upper part was done by the lead (left) hand and anything
done to the lower part was done by the trail (right) hand. But that is not
perfectly true; the hands overlap, and therefore necessarily impinge on
the "wrong" part of the grip. Both Choi-Park and Koike
instrumented the grip by dividing it into a lower part (toward the
clubhead) and an upper part (toward the butt). They assumed that
anything done to the upper part was done by the lead (left) hand and anything
done to the lower part was done by the trail (right) hand. But that is not
perfectly true; the hands overlap, and therefore necessarily impinge on
the "wrong" part of the grip.In the picture, the red dashed line is the best possible split if the instrumented grip is simply split into an upper and lower portion. We can see that the lead thumb and forefinger live on the trail part of the grip, and the trail fifth finger lives on the lead side of the grip. And this is probably the best split; move the red line and the overlap errors might become greater. But that is not the only problem with overlap. The hands actually interact. The green arrow represents a force exerted by the base of the trail thumb on the lead thumb, which in turn increases the force the lead thumb exerts on the grip. That's an added complication. |
||||
| Choi and Park do not simply
dismiss this problem. They write:
The hand grip posture by covering the left
thumb by the thenar eminence of the right hand leads to the coupling of
the grip forces of both hands. Then, the embedded force sensor
measurement could possibly underestimate the difference in the
hand-grip
forces. To examine this overlap effect on grip force measurement,
subjects also performed swings by grasping the club with two hands
completely separated.
They then measured the "internal" forces and torques from normal swings
and hands-separated swings. Here is their result. In any event, I think there are pretty substantial differences between the regular grip and the split grip, in the order of 50% of the total force for much of the downswing. The torque differences were less, but still more than 10% of the total torque. So I am not prepared to dismiss the difference out of hand. The Koike conference paper is only four pages, and doesn't get to that level of detail. So I don't know how carefully Koike considered this problem. The problem needs to be solved. The solution needs to be both correct and convincing. I must admit that I have no idea how to do it with an instrumented grip. All I can think of is instrumented gloves, which have their own problems. |


There are other things I can think of that might be improved. But they are considerably less important than these five. Solve these, and we can all learn something useful about the golf swing while we do the next round of refinements.
Last
modified -- 3/21/2021
|
|